Process and Thread
A process is the unit of resource allocation, while a thread is the unit of scheduling.
Process
Process is the basic unit the oprating system allocating resources for.
A process is made up of three parts: PCB, Program and Data.
The process control block stores all the information the operating system needs about a particular process: where it is stored in memory, where its executable image is on disk, which user asked it to start executing, what privileges the process has, and so forth.
A typical x86-64 virtual memory layout is presented below. The .data segment is primarily used for storing global and static variables that are initialized. The .bss segment is used for uninitialized global and static variables. The .rodata stores constant data and string literals. The .text is the read-only code.

In Intel processors, the privilege level of a process is stored in a field within the Code Segment (CS) register. This field is known as the Current Privilege Level (CPL).
The CPL can have four levels of privilege from 0 to 3, with level 0 being the most privileged and level 3 being the least. Typically, the kernel code runs at privilege level 0 (known as Ring 0), and user applications run at privilege level 3 (Ring 3).
When a user-level process executes a system call, it triggers a transition from Ring 3 to Ring 0. The processor automatically changes the CPL to 0. When the kernel code has finished handling the system call, it executes a special return-from-system-call instruction, and the processor switches the CPL back to 3.
Process Life Cycle
A process in five states:
Creating: referred to as
UNUSEDin xv6.Runable/ Ready
Running
Blocked/ Waiting: The execution of this process is suspended and will not be scheduled. A process stops as a result of receiving a
SIGSTOP,SIGTSP,SIGTTINorSIGTTOUsignal, and remains stopped until it receives aSIGCONTsignal, at which point it becomes running again. It can be further categorized as uninterruptible sleep and interruptible sleep.Terminated: A process become terminated for: Receving a signal whose default action is to terminate the process; Returning from the main routine; Calling the
exitfunction.

Suspended Processes
Consider a system without virtual memory where each process to be executed must be loaded fully into main memory.
Problem: Processor is so much faster than I/O that the processor could be still idle most of the time.
Solution: Swap these processes to disk to free up more memory and load some other processes to increase throughput.
Swapping is also an I/O operation.Why it does not make the situation worse? Disk I/O is the fastest I/O on a system.
Two Suspend States
Blocked/Suspend:The process is in secondary memory and awaiting an event.
Ready/Suspend:The process is in secondary memory and is available for execution if loaded into main memory.
Blocked/SuspendightarrowReady/Suspend: The event that the process is waiting for occurs.
Ready/SuspendightarrowReady
When there are no ready processes in main memory.
A process in the Ready/Suspend has higher priority than any processes in the Ready state.
Process Control
See Programming: Process and Thread.
Thread
Each thread of a multi-thread program have its own stack and PC. They do share the data (typically global variables) and code from the process.
Application of Thread: Parallel block zero
In practice, the operating system will often create a thread to run block zero in the background. The memory of an exiting process does not need to be cleared until the memory is needed — that is, when the next process is created.
Per-Thread State
The thread control block holds two types of per-thread information:
Per-thread Computation State
A pointer to the thread’s stack and a copy of its processor registers.
In some systems, the general-purpose registers for a stopped thread are stored on the top of the stack, and the TCB contains only a pointer to the stack (Many early and simplistic computer architectures and operating systems employed this method). In other systems, the TCB contains space for a copy of all processor registers (*nix).

Per-thread Metadata: thread ID, scheduling priority, status, et al.
Thread Life Cycle

Thread Control
Creating a Thread: The creation of a thread involves the setup of its own stack, where local variables, function arguments, and return addresses are stored. Let's break down the following code that demonstrates this:
Deleting a Thread: When a thread calls thread_exit, there are two steps to deleting the thread:
Remove the thread from the ready list so that it will never run again.
Free the per-thread state allocated for the thread.
A thread never deletes its own state. Some other thread must do it. On exit, the thread transitions to the FINISHED state, moves its TCB from the ready list to a list of finished threads the scheduler should never run. Once the finished thread is no longer running, it is safe for some other thread to free the state of the thread.
Implementing Threads
User Level Threads
User threads function fully within user space, bypassing kernel intervention for operations. They're managed by user-level thread libraries like POSIX Pthreads or Java Thread API. They switch contexts faster than kernel threads but can block other user threads if one performs a blocking operation.
Kernel Level Threads
Kernel threads can execute kernel code and alter kernel data structures. Managed by the OS, they're used for tasks like process scheduling. They offer more concurrency than user threads but have higher context-switching overhead.
Hybrid Thread Approach
This method merges benefits of user and kernel threads. The OS recognizes both thread types and can map multiple user threads to one kernel thread or keep a one-to-one ratio. It balances fast context switching of user threads with kernel thread integration, but managing this system can be complex.
Examples of Relationships Between User-Level Thread States and Process States

(a): normal scenarios.
(b): The application executing in thread 2 makes a system call that blocks process B. For example, an I/O call is made.
(c): A clock interrupt passes control to the kernel and the kernel determines that the currently running process B has exhausted its time slice.
(d): Thread 2 has reached a point where it needs some action performed by thread 1 of process B. Thread 2 enters a Blocked state and thread 1 transitions from Ready to Running.
Practice (COMP130110Final@FDU, 2017)
Assume a process P has two pure user-level threads, T1 and T2. Which one of the following statements is correct?
T1 and T2 may be in running state at certain moment;
If P is in Ready state, it is also possible that T1 (or T2) is still in Running state;
If P is in Blocked state, it is impossible that T1 (or T2) is in Running state;
If T1 (or T2) is in Blocked state, P must be in Blocked state.
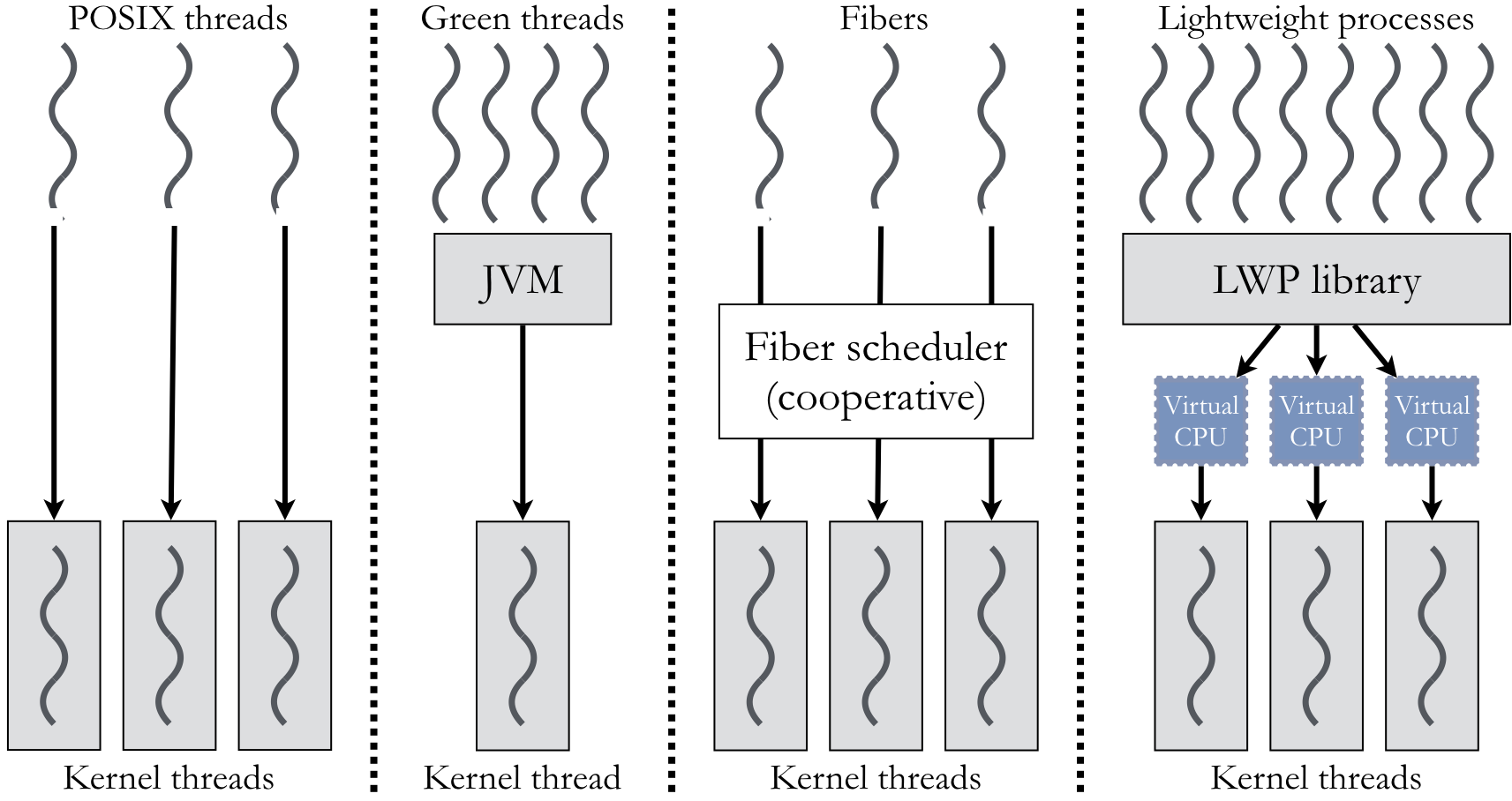
Multi-thread Model
One-to-one: In Linux and pintos, we adopt the simple one-to-one threading model. Every user thread has its kernel thread. In kernel, we use the kernel stack and in user mode we use the user stack.
Many-to-one: We can perform user-level yield without borthering switching to the kernel mode. However, this model has some downsides. If one user thread initiates an I/O job, all the other user threads will also go to sleep. The reason is that they share a common kernel thread.
To address this issue, we propose Many-to-Many model.
Last updated